近期,合肥工业大学汽车与交通工程学院石琴教授团队,在新能源汽车动力学研究领域取得新进展,相关研究成果“A Model Predictive Control Approach with Slip Ratio Estimation for Electric Motor Anti-lock Braking of Battery Electric Vehicle”在《IEEE Transactions on Industrial Electronics》(TIE)上发表(DOI: 10.1109/TIE.2021.3112966)。

新能源汽车有别于传统燃油汽车,可以采用电动机进行回馈制动,回收整车制动能量,提高能量使用效率,增加续驶里程。但是,在电动机回馈制动过程中存在两个方面问题:一是在低附路面,电动机回馈转矩过大会导致车轮抱死;二是电动机转矩响应非常快(毫秒级),进一步导致车轮抱死速度快。上述问题给新能源汽车在回馈制动过程中整车稳定性带来新的挑战。而传统内燃机转矩响应较慢(秒级),两者相差超过百倍,再沿袭车速和轮速作为状态变量构建整车动力学的传统方法,已经不能够准确描述车轮在运动过程中的瞬态特征,也难以满足电动机回馈制动过程中的控制需求。团队尝试以车轮滑移率为状态变量,电动机转矩与地面制动力的综合等效转矩为系统输入,构建新能源汽车整车制动动力学模型,开展电动机回馈制动车轮防抱死整车稳定性控制研究。
为了实现对车轮滑移率的精准控制,该研究首次应用PI观测器对地面制动力进行实时计算,获得地面利用附着系数,根据车轮的状态,进一步提取出地面最大附着系数。为了应用地面附着系数进行整车稳定性控制,基于估计得到的地面附着系数,石琴团队在汽车研究领域首次勾画出地面理想滑移率曲线,并在研究过程中提出了一套完整的地面理想滑移率曲线构建方法,如图2所示,地面理想滑移率曲线不仅仅可以用于新能源汽车稳定性控制,也为未来无人驾驶汽车智能化整车稳定性控制的车轮滑移率找到了理论上的优化边界。
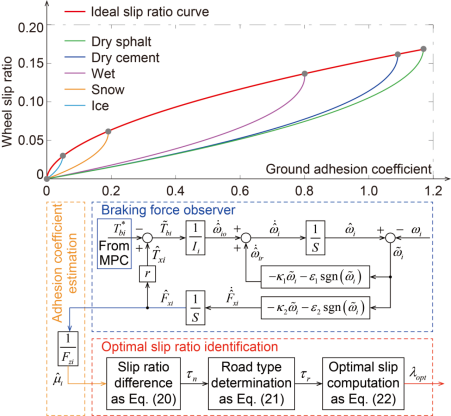
理想滑移率曲线及其构建方法
该项研究得到了安徽省高校协同创新项目GXXT-2020-076,安徽省发改委新能源与智能网联汽车创新工程项目等项目资助,本校博士生贺泽佳为第一作者,指导教师石琴教授为第二作者,贺林研究员为通讯作者。
近一年内,石琴教授团队在新能源汽车动力学与控制方向的研究取得了一系列进展,相关研究成果发表在《IEEE Transactions on Industrial Informatics》《IEEE/ASME Transactions on Mechatronics》《IEEE Transactions on Vehicular Technology》《Vehicle System Dynamics》《Science China Technological Sciences》等汽车研究领域著名期刊上,在学术研究领域为学校车辆工程学科的建设与发展提供了有力的支撑。(通讯员:合肥工业大学贺泽佳)